
Affective Android Dynamics Lab

SUPERVISER
石原尚 教授

博士(工学)。1983年生。立命館大学デザイン・アート学部教授。2007年大阪大学工学部応用理工学科機械工学科目で学士号、2009年大阪大学工学研究科知能・機能創成工学専攻で修士号を取得(いずれも浅田稔教授研究室)。2009年に博士後期課程に進学し、同研究室にて2012年まで日本学術振興会特別研究員DC1。特任研究員および特任助教を経て2014年に博士(工学)を取得後、2019年1月まで大阪大学工学研究科テニュアトラック助教。2019年に講師昇格(中谷彰宏教授研究室)。2020年より2024年10月まで機械工学専攻講師(大須賀公一教授研究室)。2024年11月に准教授昇格。2025年4月より感情アンドロイドダイナミクス研究室主宰。2026年4月より立命館大学に異動し、現職。2016年から2020年までJSTさきがけ研究者(黒橋貞夫教授領域)を兼任。
現職
- 教授(常勤・専任)2026年4月 - 現在
- 立命館大学デザイン・アート学部「アンドロイドロボットによる心の動きの表現」
- 教員(兼任)2019年4月 – 現在
- 大阪大学 先導的学際融合研究機構 共生知能システム研究センター 知能ロボット研究グループ(浅田稔教授研究室)「共生知能システム研究センターにおける教育研究」
- 客員研究員(兼任)2013年8月 – 2023年3月,2023年5月 - 現在
- 理化学研究所 脳神経科学研究センター 言語発達研究チーム(馬塚れい子研究室)「遠隔操作型の子供型アンドロイドの開発と対人実験の実施」
過去の職歴
- 日本学術振興会特別研究員(DC1)2009年4月 – 2012年3月
- 大阪大学 大学院工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田稔教授研究室)「他者の模倣反応における無意識的な情報の偏りを利用した機械学習アルゴリズムの理論検討」
- 特任研究員(非常勤)2012年4月 - 2013年3月
- 大阪大学 大学院工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田稔教授研究室)基盤研究S「構成的手法による身体バブリングから社会性獲得に至る発達過程の理解と構築」代表:浅田稔 「柔軟皮膚を備える子供型アンドロイドロボットの頭部機構の設計開発」
- 特任助教(常勤)2013年4月 – 2014年1月
- 大阪大学 大学院工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田稔教授研究室)特別推進研究「神経ダイナミクスから社会的相互作用へ至る過程の理解と構築による構成的発達科学」代表:浅田稔「空気圧でしなやかに動作する子供型アンドロイドの上半身骨格機構の設計開発と動作生成」
- 教員(兼任)2013年6月 – 2018年3月
- 大阪大学 未来戦略機構 第七部門 「未来戦略機構における第七部門の教育研究」
- テニュアトラック助教(専任・常勤)2014年2月 – 2019年1月
- 大阪大学 大学院工学研究科 附属高度人材育成センター 若手研究者育成部門「人と親密に触れ合える子供型アンドロイドロボットの全身の感知・表現力の向上と実験応用」
- 助教(兼任)2014年2月 – 2019年1月
- 大阪大学 大学院工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田稔教授研究室)「人と親密に触れ合える子供型アンドロイドロボットの全身の感知・表現力の向上と実験応用」
- 連携研究員(兼任)2015年7月 – 2022年3月
- 国際電気通信基礎技術研究所(ATR)「アンドロイド用触覚センサを応用した人歩行時の足裏負荷計測装置の開発研究」
- さきがけ研究者(兼任)2016年12月 – 2020年3月
- 科学技術振興機構(JST)新しい社会システムデザインに向けた情報基盤技術の創出(黒橋禎夫教授領域) 「親密な触れ合いで顕著化された人の社会的反応情報を能動的に収集して利用可能にする子供アンドロイドの高機能化」
- 講師(専任・常勤)2019年1月 – 2019年3月
- 大阪大学 大学院工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田稔教授研究室) 「人と親密に触れ合える子供型アンドロイドロボットの全身の感知・表現力の向上」
- 講師(専任・常勤)2019年4月 – 2020年3月
- 大阪大学 大学院工学研究科 知能・機能創成工学専攻 マイクロダイナミクス研究室(中谷彰宏教授研究室)「人とアンドロイドの顔表情表出に伴う顔面変形の解析」
- 講師(常勤・専任)2020年4月 – 2024年10月
- 大阪大学 大学院工学研究科 機械工学専攻 知能機械学部門 動的システム制御学領域(大須賀公一教授研究室)「アンドロイドロボットの高機能化研究」
- 次世代リーダー教員(兼任)2021年4月 - 2026年3月
- 大阪大学大学院工学研究科若手卓越支援部門
- 准教授(常勤・専任)2024年11月 – 2026年3月
- 大阪大学 大学院工学研究科 機械工学専攻 知能機械学部門 動的システム制御学領域(大須賀公一教授研究室)「アンドロイドロボットの高機能化研究」
学歴・学位
- 2002年3月 広島大学附属高等学校卒
- 学士(工学)2007年3月23日 大阪大学工学部 応用理工学科 機械工学科目
- 修士(工学)2009年3月24日 大阪大学大学院 工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田稔教授研究室)
- 博士(工学)2014年1月24日 大阪大学大学院 工学研究科 知能・機能創成工学専攻 創発ロボティクス研究室(浅田稔教授研究室)
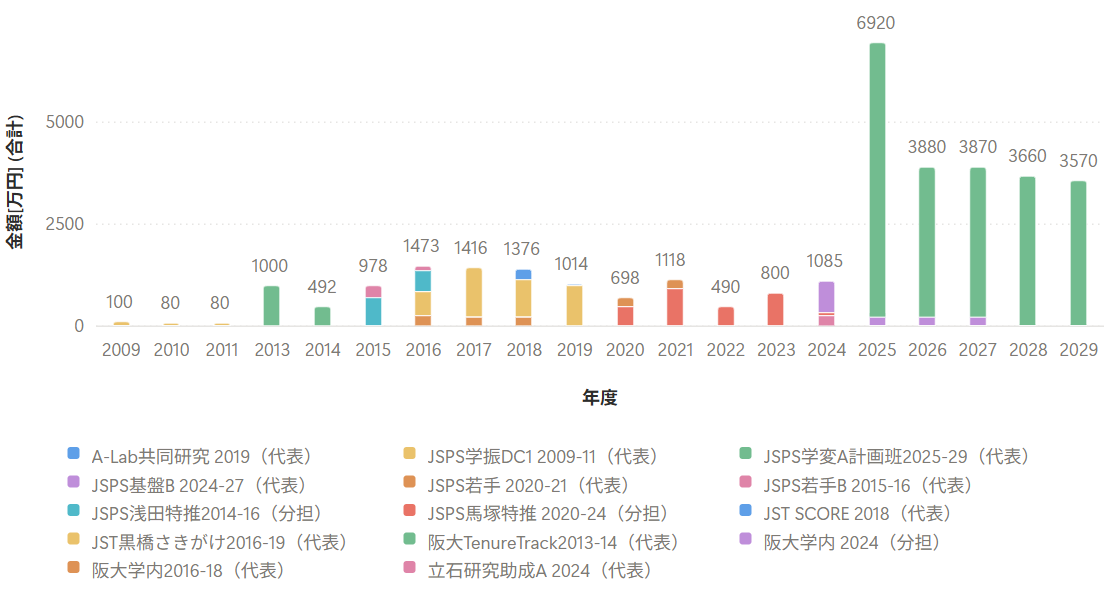
研究資金獲得実績
- JSPS学術変革領域研究(A)「顔身体のデザイン:実践・実証・設計に基づく顔身体の深化と昇華(領域代表:山口真美教授)」における「人工の顔身体/表現の機能構造を設計する」.2025年4月-2030年3月.代表(計画班).予算総額276,250,000円.
- JSPS基盤研究(B)「Infants' Curiosity in Social Interactions:乳児の最適学習を支える社会的基盤の解明(代表:萩原広道)」.2025年4月-2029年3月.分担.R6年度400,000円.
- “はばたく次世代”異分野融合研究プロジェクト「子どもの社会性・知性・意欲の変化は「教え方」をどう変えるか?―子ども型アンドロイドを用いて(代表:萩原広道)」.2025年1月-2026年2月.分担.R6年度150,000円.
- JSPS基盤研究(B)「顔皮膚運動の変形解析と時空間分離解析に基づく次世代型高表現アンドロイド設計」.2024年4月-2028年3月.代表(単独申請).R6年度7,700,000円.R7年度2,300,000円.R8年度2,100,000円.R9年度2,100,000円.
- 立石財団研究助成(A)「高度な表現力を備えるアンドロイドの感性評価に基づく対人印象制御法の開発」.2024年4月-2025年3月.代表(単独申請).R6年度2,500,000円.
- JSPS特別推進研究「アジアと欧米:コミュニケーションの文化差から言語の獲得過程を探る(代表:馬塚れい子)」.2020年7月-2025年3月.分担.R2年度4,900,000円.R3年度9,100,000円.R4年度4,900,000円.R5年度8,000,000円.R6年度500,000円.
- JSPS科研費 若手研究「有機材料の活用によるアンドロイド皮膚の高機能化」.2020年4月-2022年3月.代表.R2年度2,080,000円.R3年度2,080,000円.
- 株式会社A-Lab 共同研究 「アンドロイドロボットの表情表出性能評価に関する研究」.2019年7月-2022年3月.242,000円.
- JST SCORE「接触面における三次元皮膚負担を推定可能なセンサシートの事業化検証のための大規模センサアレイ開発」.2018年8月-2019年3月.代表.H30年度2,300,000円.
- JSTさきがけ「触れ合いデータを収集する子供アンドロイド高機能化」.2016年12月-2020年3月.代表.H28年度6,060,000円.H29年度12,000,000円.H30年度9,300,000円.H31年度9,900,000円
- 大阪大学 知の共創プログラム「触れ合いの社会認知神経科学ロボティクス」.2016年4月-2019年3月.代表.H28年度2,500,000円.H29年度2,156,000円.H30年度2,156,000円
- JSPS若手研究B「ヒト皮膚の張力膜構造を模した柔軟外装の子供アンドロイドへの全身実装と機能評価」.2015年4月-2017年3月.代表.H27年度2,990,000円,H28年度1,170,000円.
- JSPS特別推進研究「神経ダイナミクスから社会的相互作用に至る過程の理解と構築による構成的発達科学(代表:浅田稔)」. 2014年4月-2017年3月.分担.H26年度184,000円,H27年度6,794,000円,H28年度5,000,000円.
- 科学技術人材育成費補助金テニュアトラック普及・定着事業.2013年2月-2018年3月.H25年度10,000,000円,H26年度4,735,000円.
- JSPS特別研究員奨励費(DC1)「養育者の無意識的親行動を考慮した乳児の模倣発達メカニズムの構成論的モデリング」.2009年4月-2012年3月.代表.H21年度1,000,000円,H22年度800,000円.H23年度800,000円.
受賞
- 2008年 JIDPOグッドデザイン賞. コミュニケーション発話知能ロボット “Vo-Cal(Vivid Oral Conversation through Acquiring Language)”. JEAP/阪大浅田・川崎共同研究(開発部分担当), 2008.
- 2008年 ECSIS Symposium on Learning and Adaptive Behaviors in Robotic Systems, BEST Video Award and $1000 prize, “Cognitive Developmental Robotics with a Biomimetic Child-robot”. T. Noda, S. Ikemoto, D. Quevedo, T. Shimizu, H. Sumioka. H. Ishihara, Y. Sasamoto, Y. Yoshikawa, T. Minato, H. Ishiguro, M. Asada.
- 2008年 AAAI-08 AI Video Competition, Best Video Award Finalists, “CB2: Child Robot with Biomimetic Body”, T. Noda, S. Ikemoto, D. Quevedo, T. Shimizu, H. Sumioka, H. Ishihara, Y. Sasamoto, Y. Yoshikawa, T. Minato, H. Ishiguro, M. Asada.
- 2009年3月 修士論文最優秀発表賞 及び 最優秀論文賞 「Perceptual Biases by Empirical Anticipation Shape Infant’s Vowel through Auto Mirroring(自己ミラーリングを通じた経験的な予期による知覚バイアスによる乳児母音の誘導的発達)」大阪大学大学院工学研究科 知能・機能創成工学専攻
- 2010年9月 大会発表賞「乳児母音発達における親の期待の持つ誘導的効果: 発達シミュレーション及び音声模倣実験による検討」 日本認知科学会第27回大会
- 2011年9月 学生奨励賞「写実的な子供酷似型ロボットを用いた愛着関係と心的発達研究に向けた将来展望」 平成23年度情報処理学会関西支部支部大会
- 2015年12月 優秀ポスター講演論文賞(共著)「磁性・非磁性エラストマを積層した磁気式触覚センサの基礎特性解析」 第24回MAGDAコンファレンス
- 2016年7月 2nd Best Poster Award (共著)「Principal Component Analysis of Two-dimensional Flow Vector Fields on Human Facial Skin for Efficient Robot Face Design(効率的な顔ロボット設計のための人の顔面皮膚の流れベクトル場の主成分分析)」 The 5th International Conference on Biomimetic and Biohybrid Systems(Living Machines)
- 2016年11月 Best Robot Design Award (as 3rd place) 「Child Android Robot “Affetto”(子供型アンドロイドロボットAffettoのデザイン)」The 8th International Conference on Social Robotics
- 2019年3月 学生奨励賞(共著) 「子供型アンドロイドの接触反応表現のための柔軟な表情生成器と割り込み表情制御器の開発」HAIシンポジウム
- 2021年 インパクトポスター賞「感触を損なわずに弾性柔軟素材を触覚センサにする技術」エレクトロニクス実装学会実装フェスタ関西
- 2025年10月 The Innovative Design Contest Encouragement Award(共著)「Design Improvement Initiatives in the Student-Built Vehicle Development Project: Efforts to Win the 1st Place in the Formula SAE Japan」International Conference on Design and Concurrent Engineering & Manufacturing Systems Conference (iDECON/MS) 2025
学内担当講義
- 基盤PP(通年・班担当)
- 工学研究科 知能・機能創成工学専攻 修士1年生向けの企業共同PBL.H26-H30.
- 機械創成工学実習III(後期・曜日担当)
- 工学部3年生向けロボット開発実習.H26-現在.
- 物理学実験(前期・曜日担当)
- 大阪大学1年生向け科学実験実習.H27.
- 計算機とプログラミング(秋冬・部分担当)
- 大阪大学工学部2年生向けC言語基礎文法.H31-現在.
- 情報科学基礎B(春・部分担当)
- 大阪大学工学部1年生向け Python演習.R2-R3.
- 大阪大学工学部1年生向け情報基礎.R4-現在.
- 電気電子工学I(春夏・部分担当)
- 大阪大学工学部3年生向け交流回路解析.R2-現在.
- ロボティクス(春夏)
- 大阪大学工学部4年生向けのロボティクス理論講義.R2-現在.
- プロダクトデザイン(通年・班担当)
- 大阪大学大学院工学研究科 機械工学専攻 修士1年生向けの企業共同PBL.R2-現在.
- アンドロイド工学概論(1コマ担当)
- 大阪大学工学部メカトロニクス基礎中の1コマ講義.R2-現在.
- 学問への扉(春夏)
- 大阪大学1年生向けアカデミックスキル入門演習「空想科学による仮想研究実践」.R5.
顧問・アドバイザ
- 大阪大学フォーミュラレーシングクラブ(OFRAC)教員アドバイザ(通年)
- 運営管理指導、開発車両テストへの帯同,全日本大会への帯同,寄附金受け入れ.H29-R7.
- 大阪大学未来基金「学部学生による自主研究奨励事業」アドバイザ(通年)
- 「熱効率向上を目的とした既存市販エンジンに搭載可能なポンプ損失低減システムの開発と実践」.H29.
- 「複数のステアリングシステム要素の剛性変更による車両操作性向上効果の実測と評価」.H30.
- 「実測データによる補正を通じたエンジン冷却システム計算モデルの小型フォーミュラカーへの適用と精度評価」.H30.
- 「理論との挙動ずれの大きい機械要素を含む車両の多面的性能評価のための実験と解析」.H31.
- 「タイヤモデル同定における遺伝的アルゴリズムの適応手法の開発」.R2.
- 「車両限界性能向上を目的とした自動車用ダンパーの電子制御に関する開発」.R4.
- 「車両用ラジエータにおける空気流量の間接的測定に関する研究」.R5.
- SEEDS実感科学研究生受け入れ(前期)
- 大阪大学.高校生受け入れ研究「痛みを感じるロボット?子ども型ロボットの感情表出システムの開発」.H30.
出張講義・セミナー
- 高校生向け講演 「子供型アンドロイドロボットに関する理想と現実のギャップを埋める」徳島県立脇町高校.文理融合教育SW-ingレクチャー.2017年11月17日.
- サイエンスカフェ 「完璧なアンドロイドをつくるのはなぜ難しいのか?」大阪大学先導的学際研究機構附属共生知能システム研究センター大阪大学ロボットサイエンスカフェ.2021年3月31日.
- 教員・研究者向けセミナー 「パラグラフライティング入門講座」東京都立大学総合研究推進機構.科研費対策セミナー.2021年6月7日.
- サイエンスカフェ 「完璧なアンドロイドをつくるのはなぜ難しいのか?」千里ライフサイエンス振興財団・大阪大学免疫学フロンティア研究センター.ライフサイエンスセミナー:研究者と語ろう.2021年7月30日.
- 講義「アンドロイド工学概論」.青山大学.2022年5月30日.
- 企業技術者・研究者向けセミナー 「伝わる技術文書作成入門講座」株式会社R&D支援センター.2022年6月10日
- 企業技術者・研究者向けセミナー 「知識・技術の価値を伝える実践的ライティングセミナー」株式会社 情報機構.2022年10月20日.
- 大学生・大学院生向けセミナー 「伝わる文章の書き方」宮崎大学工学部.工学×女子交流会スキルアップセミナー.2022年11月15日.
- 企業技術者・研究者向けセミナー「技術者のための技術文書作成の基礎と実践ノウハウ ~実習付~」日本テクノセンター オンラインセミナー.2023年5月19日.
- 学会セミナー「研究テーマの昇華法 −曖昧なテーマを論文や発表資料に変えるには−」 ヒューマンインタフェース学会 ヒューマンインタフェースシンポジウム. 2023年9月6日.
- 企業技術者・研究者向けセミナー「伝わる技術文書作成入門講座 -文書作成・手直しの手順とコツやパラグラフライティングのポイントについて-」.株式会社R&D支援センター オンラインセミナー 2023年10月12日.
- 大学生・大学院生向けセミナー 「伝わる文章の書き方2」宮崎大学工学部.工学×女子交流会スキルアップセミナー.2023年12月14日.
- 話題提供「アンドロイド研究と研究プロセスの明文化」Bento-kai #03 AIと科学 -自律的研究を行うエージェントと「いい研究」について.2024年4月20日.
- 講義「研究テーマのデザインと研究遂行の方法論」東京電機大学.アドバンスドメカトロニクス特論.2024年4月22日.
- 企業技術者・研究者向けセミナー「技術文書作成に必要なライティングスキル修得実践講座」日本テクノセンターオンラインセミナー.2024年5月10日.
- 講義「技術文章を書くための執筆技術と実践法」東京電機大学.アドバンスドメカトロニクス特論.2024年5月13日.
- 講義「『完璧な』アンドロイドロボットを 実現するために」東京電機大学.アドバンスドメカトロニクス特論.2024年6月3日.
- 講師「「総合的な探究の時間」における探究活動(中間発表会)の講評」大阪府立東高等学校.総合的な探究の時間.2024年11月21日.
- 講義「研究テーマのデザインと研究遂行の方法論」東京電機大学.アドバンスドメカトロニクス特論.2025年4月21日.
- 企業技術者・研究者向けセミナー「技術者のための技術文書作成の基礎と実践のポイント」日本テクノセンターオンラインセミナー.2025年5月30日.
- 講義「技術文章を書くための執筆技術と実践法」東京電機大学.アドバンスドメカトロニクス特論.2025年4月28日.
- 講義「『完璧な』アンドロイドロボットを 実現するために」東京電機大学.アドバンスドメカトロニクス特論.2025年6月2日.
SELECTED WORKS
詳細は各項目の▶ボタンを押すと開きます
期待バイアスを含む他者の模倣を利用した知覚運動系の誘導的機械学習法の提案(2011)
- 石原尚,若狭みゆき,吉川雄一郎,浅田稔.乳児母音発達を誘導する自己鏡映的親行動の構成論的検討.認知科学, 18:1, 100–113, 2011.
詳しく知る
子供が母国語の母音を獲得する過程に,親の期待や模倣の癖(バイアス)がどのように影響するかを計算機シミュレーションで分析した研究です.
子供の声は,生後一年をかけて徐々に母国語に特化したものになっていき,日本人なら日本語の5つの母音をうまく発音できるようになり,またそれらをうまく聞き分けられるようにもなっていきます.そして,親の「あ」という声を聴いて,親にも「あ」と聞こえる音を出せるように真似もうまくなっていきます.このような母音獲得を子供は当たり前のように達成しているものの,「発音の学習」「音声知覚の学習」「模倣のための知覚と発音の結びつけの学習」の3つの学習の達成が必要であること,また,これらの学習の期間には様々なやりとりが親との間で交わされていることから,いったいどのような仕組みと条件で母音獲得が達成されているのかは完全には明らかになっていません.そこで,計算機シミュレーションによって,それらを明らかにする取り組みを行いました.
まず最初に作成した計算モデルは,相手の発音した単母音の音声(二次元ベクトルとして表現)を自分の発話運動(二次元ベクトルとして表現)に変換する模倣関数を2つ用意して,互いの出力が入力となるように結び付けたものです.これは,親と子が互いに声を真似しあうことが母音獲得を促しているという仮説があったためです.一方の模倣関数は親による模倣に使われるものであり,「親の真似のうまさは変わらない」という想定のもと,模倣の仕方を決める関数のパラメータは固定であるものとしました.もう一方の模倣関数は子による模倣に使われるものであり,「子の真似のうまさは,親に真似されるごとに向上する」という想定のもと,親に模倣をされる度に,よりうまく模倣ができるように関数のパラメータが更新されるものとしました.このような設定にしておいて,はじめは母音ともとれない曖昧な音ばかりであった子の発話が,親との声の相互模倣の繰り返しを通じて,どのように移り変わっていくかを計算で確かめてみました.期待される結果は,徐々に「あいうえお」の単母音を喋れるようになっていくことでした.しかし,シミュレーションの結果はそうはならず,曖昧な音ばかりを発するままでした.つまり,相互模倣だけでは母音獲得は達成できない,ということがわかりました.
上記のシミュレーションで最終的に行われていた模倣のやりとりは,「子も親も,複数の母音が混ざったような曖昧な音を繰り返し互いに真似しあっている」というものでした.しかし,このように曖昧な音ばかり真似しあう状況は不自然です.少なくとも親の側は,曖昧な音でも母国語の母音のいずれかの音に似た音として聞くという特性(知覚のマグネット効果として知られています)を有していますし,曖昧な音より普段使っている母音の方が発音しやすいので,親の発話は子の発話に比べて,母音の知覚にまとまって分布するはずです.そこで,このような「聞いた音をより母音に近い音として模倣する」という癖(バイアス)をSensorimotor magnetsと名付けて,親の模倣関数に組み込みました.このようにすると,声の模倣の繰り返しを通じて,子の発話は5つの音に収束していきました.しかし,それらの音は,「母音ではない」曖昧な音でした.言い換えると,親のSensorimotor magnetsは,子の発話を一定の音に収束させる効果を持つものの,その音が母国語の母音になるように誘導する効果は持たない,ということがわかりました.
そこで,親が模倣する際に起きているであろう別の癖も親の模倣関数に組み込むことにしました.これは,聞こえてくると期待していた音の方に知覚が引き寄せられる,というものです.互いに声を真似をしあっている状況で,親がある声を発した後には,その声に対する真似の声が聞こえてくると無意識的にも期待すると考えられます.そこで,自分自身が発した声によって,聞こえる音がそちらよりの音として知覚されるというバイアスがあると仮定し,これをauto-mirroring bias(自己鏡映バイアス)と名付け,模倣関数に組み込みました.そして,上記のSensorimotor magnetsとauto-mirroring biasの強さを様々に変えた条件で相互模倣のシミュレーションを行ったところ,これらの二つのバイアスの強さのバランスが取れている場合に,子の発話は一定の音に収束しながら,徐々に母国語の母音に導かれていくという母音獲得の過程が再現されました.
上記のシミュレーションでは,相互模倣の状況で自分自身が発した声によって聞こえる音がそちらよりの音として知覚されるAuto-mirroring biasが存在すると仮定した場合に,子の母音獲得のメカニズムが説明できることが示されました.そこで,このバイアスが成人の模倣傾向として存在するかを検証する実験を実施しました.合成音声を実験参加者に利かせ,その合成音声と相互に模倣しあってもらったときの模倣の傾向を解析したところ,このバイアスの存在を裏付けるような模倣傾向となっていることが確認されました.
空気圧アクチュエータを高密度に人型身体に実装する筋骨格機構のデザイン(2015)
- Hisashi Ishihara and Minoru Asada. Design of a 22 DOF pneumatically-actuated upper body for a child android ‘Affetto’, Advanced Robotics, 29:18, 1151-1163, 2015.
- Press Release (2015-7-31) 小型でしなやかに動く子ども型ロボット「Affetto(アフェット)」の基本骨格を開発
操作量に対して非線形の変位を呈するアンドロイド顔皮膚の操作性評価と改善(2018)
- Hisashi Ishihara, Binyi Wu, and Minoru Asada. Identification and evaluation of the face system of a child android robot Affetto for surface motion design, Frontiers in Robotics and AI, 5:119, 2018.
- Press Release (2018-11-14) 新型子供アンドロイドの表情変化の作り分けに成功
詳しく知る
アンドロイドロボットを高機能化しようと,様々な内部機構や皮膚の構成が検討されています.しかし,各種構成によって結局どのくらい良いアンドロイドができたのかを測るための統一的・客観的な評価指標がないため,多種のアンドロイドとの比較検討がなく,乱立気味です.アンドロイドの開発競争が効果的に行われるようにするためには,どのような構成のアンドロイドであっても適用可能でありながら,具体的な特性の良し悪しを定量的に把握できる評価指標が必要です.そこで,アンドロイドの機械性能評価を行うための方法を研究を実施しました.
アンドロイドの顔は主に,表面の柔軟被覆,被覆を支える外殻,外殻内部に収められた駆動機構の3層構造になっています.駆動機構が発揮する力が何らかの駆動力伝達方式によって外殻を経由して柔軟被覆を変形させるという仕組みです.1つのアンドロイドの顔でも,多種の表情を作り出すための多くの駆動機構が内蔵されています.
アンドロイドによって素材・形状・構造・方式は様々ですが,一般に,駆動機構の動きと被覆表面の動きの関係はかなり複雑です.たとえば,駆動機構を少し動かしただけでは被覆の表面はほとんど動きません.被覆は非常に柔らかいので,被覆の内面付近だけが変形して,力が被覆表面にまで伝わらないからです.また,被覆表面が動いたとしても,駆動機構の動きに対してどのように追従するかは,被覆の場所によって様々です.たとえば,外殻との摩擦が強い部分はなかなか追従して動きません.
このように,アンドロイドの顔の被覆は非常に操りにくいにも関わらず,その「操りにくさ」を定量化する方法はありませんでした.定量化されていなければ,改善点も特定できず,また上手く操るための対策も打てません.そこで,特定のパターンで駆動機構を1つずつ動かした際に,アンドロイドの顔皮膚表面がどのように追従するかをモーションキャプチャ装置で精密計測し,各駆動機構ごとに,被覆の追従特性を分析しました.
結果として,「①敏感性:機構の小さな動きに対して皮膚がどれだけ敏感に動くか」「➁ヒステリシス性:機構の動きの向きによって皮膚の追従性がどれだけ変わるか」「③非同期性:皮膚の追従の仕方が皮膚の位置によってどれだけ異なるか」という3つの特性値で,各機構ごとに皮膚の操りにくさの違いをうまく説明できることがわかりました.
この特性値を駆動機構ごとに把握し,3次元にプロットすることで,「皮膚の操りやすさ」という観点でどの機構がどれだけ他より優れているかを簡単に確認することができます.これで,あるアンドロイドの顔を効果的に改善するために,優先して改善すべき機構とその特性を絞りこむことができます.また,他のアンドロイドであっても,同じ方法で特性値を得ることができるため,「こちらのアンドロイドの方が,全体的にあのアンドロイドより操りやすい」といったような議論が可能になります.
磁性エラストマとコイル回路による肉厚柔軟な3軸触覚センサの実現(2018)
- Takumi Kawasetsu, Takato Horii, Hisashi Ishihara, and Minoru Asada. Flexible Tri-axis tactile sensor using a spiral inductor and magnetorheological elastomer. IEEE Sensors, 18:14, 5834-5841, 2018.
ロボットの触り心地が人に与える性格の印象をどう左右するかの解析調査(2019)
- Yuki Yamashita, Hisashi Ishihara, Takashi Ikeda, and Minoru Asada. Investigation of causal relationship between touch sensations of robots and personality impressions by path analysis, IJSR, 11:1, 141-150, 2019.
- Press Release (2021-12-2) ロボットの触り心地が性格の印象を変える4種類の効果とその増強条件を特定
詳しく知る
コミュニケーションロボットの性格印象は,主に見た目や声によってデザインされてきました.しかし,人がロボットに触れることも想定する場合,触れたときの「触感」もデザイン要素の候補として考えなけれなければいけません.なぜなら,もし触感によって性格印象が大きく変わるのであれば,下手な触感を与えてしまうと,意図したものと異なる性格印象を与えてしまう恐れがあるからです.そこで,そもそもロボットの触感が性格印象を左右するのか,また,そうだとしたらどう左右するのかを明らかにする研究を行っています.触感が性格印象を変えるメカニズムが解明できれば,ロボットの触感を変えることによって性格印象をデザインするという道が拓けます.この研究は,金沢大学 子どものこころの発達研究センターの池田尊司助教との共同研究です.
ロボットの被覆の触感の違いが,性格印象の評価をどのように変えるかを調べる準備として,まずロボットの前腕の柔軟被覆を触ったときの触感と,その前腕を持つ小型アンドロイドロボットの性格印象がどのような評価軸の上で評価されるのかを調べました.
過去の柔軟物の触感評価に使われてきた触感形容詞対(硬い-柔らかいなど)と,ロボットや人の性格印象の評価に使われた性格形容詞対(信頼できる-信頼できないなど)を集め,それを基に合計で19の触感形容詞対と46の性格形容詞対を選定しました.この形容詞対は,自分の感じた印象が対となる形容詞のどちらにどのくらい当てはまるか,ということを実験参加者に回答してもらい,印象を定量化するために使います(SD法と呼ばれる手法です).
実験参加者として男女合計で20人の成人を集め,柔軟被覆を取り付けた小型アンドロイドロボットの前腕を彼ら一人一人に触らせて,先の触感形容詞対と性格形容詞対を見せ,感じた印象を回答してもらいました.このロボットの前腕は,異なる材質となるように作成した4種類の同じ形状の柔軟被覆を簡単に取り付けたり交換できるように作られており,実験参加者は,4種類の被覆に対してそれぞれ印象を回答します.つまり,実験の後,4種類の被覆×(19種の触感形容詞対の回答+46種の性格形容詞対の回答)×20人の被験者分の回答データを得ました.
このままでは,形容詞対の数が多すぎて分析を進めるのが難しいので,似た回答傾向となった形容詞対は1つの形容詞グループにまとめて,そのグループ全体の回答データを代表値として扱う方が望ましいです.そのため,得られたデータに対して因子分析を行いました.この因子分析によって,触感形容詞対は4つ,性格形容詞対は3つのグループ(因子)に分けられることがわかりました.触感の因子は,それぞれ,触感の好ましさ,反発感,滑らかさ,生体らしさに関する形容詞対で,一方の性格印象の因子は,親近感,能力,そして活発さに関する形容詞対で構成されていました.つまり,今回の実験参加者は,今回のロボットの被覆と性格に関して,これら7つの評価軸(因子)において異なる印象を感じたということが言えます.したがって以後の分析は,これら7つの軸に関して実施します.
上述の回答データを基に,触感因子と性格印象因子の間にどのような因果関係があるのかを解析しました.もしある触感の因子と,ある性格印象の因子の間で統計的に有意な因果が見いだされれば,その触感に違いがある場合に人が感じる性格印象も連動して変わる,と判断できます.
このような因果構造を推定するために,触感因子から性格印象因子に向かう因果の向きを仮定してパス解析を実施しました.その結果,複数の有意な因果が見出されました.例えば,触感の好ましさ因子から,性格印象の親近感及び活発さの因子へは正の因果がみられました.つまり,被覆の触り心地がよいと,そのロボットは親しみやすく,また活発な性格だと認識される傾向にあるということです.また,触感の反発感因子から,性格印象の能力及び活発さの因子へも正の因果がみられました.さらに,触感の滑らかさ因子からは,性格印象の能力因子へは負の因果がみられ,また,触感の生体らしさ因子から性格印象の親近感因子へは正の因果が,能力因子へは負の因果が,そして活発感因子へは正の因果がみられました.このように,触感のどのような印象がどのように性格印象に影響するのか,そのメカニズムが明らかになってきました.
アンドロイドと人の顔の表現力を「皮膚の可動域」として定義して比較評価(2022)
- Hisashi Ishihara. Objective evaluation of mechanical expressiveness in android and human faces, Advanced Robotics, 36:16, 767-780, 2022.
- Press Release (2022-8-18) アンドロイドの「顔の表現力」に新評価法
人の顔の単位運動に伴う皮膚の圧縮と引張領域の分布の推定と可視化(2023)
- Misu Takeru, Hisashi Ishihara, So Nagashima, Yusuke Doi, Akihiro Nakatani. Visualization and analysis of skin strain distribution in various human facial actions, Mechanical Engineering Journal, 2023.
- Press Release (2023-11-9) 人の単純な顔運動にひそむ複雑な皮膚変形の様子を可視化
減衰波の重ね合わせによる動的表情合成法の提案と覚醒度変化表現の印象評価(2024)
- Hisashi Ishihara, Rina Hayashi, Francois Lavieille, Kaito Okamoto, Takahiro Okuyama, and Koichi Osuka. Automatic generation of dynamic arousal expression based on decaying wave synthesis for robot faces. Journal of Robotics and Mechatronics. 36:6, 1481-1494, 2024. DOI: https://doi.org/10.20965/jrm.2024.p1481
- Press Release (2024-12-24) アンドロイドの表情に“気分の移ろい”を滑らかに表現
NEWS
_
 アプローチ2025/3/1 13:372025/3/3 9:48研究プロジェクト2026/4/6 16:212026/4/6 16:31
アプローチ2025/3/1 13:372025/3/3 9:48研究プロジェクト2026/4/6 16:212026/4/6 16:31 メンバー2025/3/1 13:422026/4/2 15:08研究室概況2025/4/4 15:432026/4/6 16:34
メンバー2025/3/1 13:422026/4/2 15:08研究室概況2025/4/4 15:432026/4/6 16:34 学生の研究2025/3/1 13:572026/3/1 10:22
学生の研究2025/3/1 13:572026/3/1 10:22 業績一覧2024/2/6 18:162026/6/1 18:38
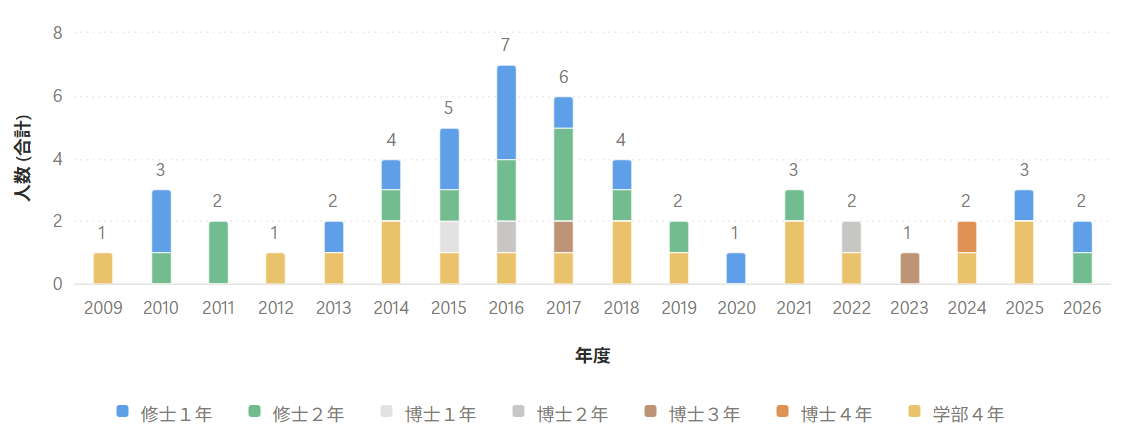
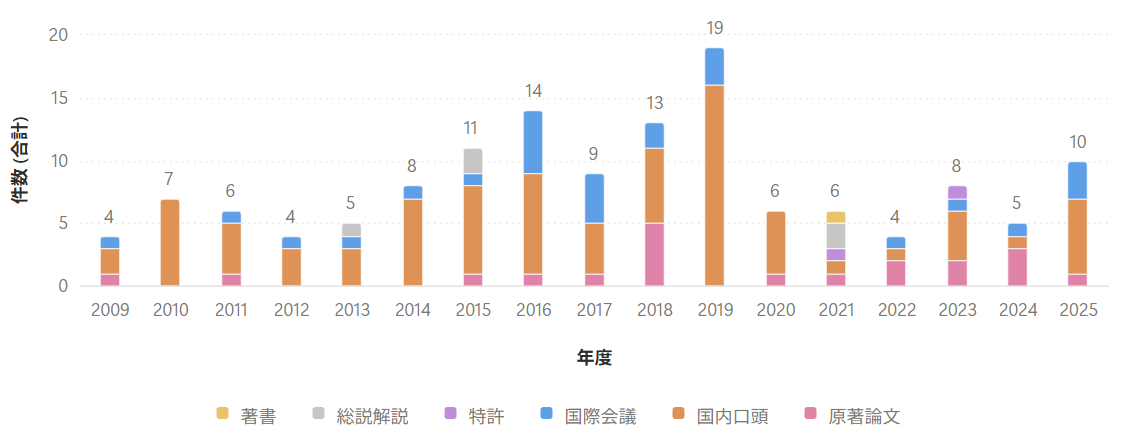
業績一覧2024/2/6 18:162026/6/1 18:38 問い合わせ2024/2/6 18:162026/4/4 14:25指導学生数 2025/3/2 22:432026/4/0 16:43業績推移2025/3/2 23:242026/3/3 19:08研究運営予算2025/3/2 21:052026/4/0 16:52
問い合わせ2024/2/6 18:162026/4/4 14:25指導学生数 2025/3/2 22:432026/4/0 16:43業績推移2025/3/2 23:242026/3/3 19:08研究運営予算2025/3/2 21:052026/4/0 16:52